Unsupervised discovery and predictive sensorimotor transformation of spider prey capture through active vibration sensing
Unsupervised discovery and predictive sensorimotor transformation of spider prey capture through active vibration sensing
Hung, H.-Y.; Corver, A.; Gordus, A. G.
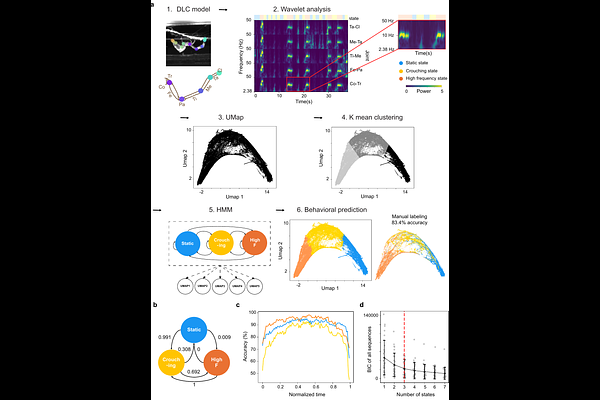
AbstractAnimals flexibly adjust posture and movement in response to vibrational sensory input to extract information from dynamic environments. While sensorimotor transformations have been extensively studied in visual and somatosensory systems, their structure remains poorly understood in substrate-borne vibration sensing. Here, we combine high-resolution web vibration recordings with fine-scale behavioral tracking in the orb-weaving spider Uloborus diversus to dissect the sensorimotor basis of prey capture. Using unsupervised modeling, we identified discrete behavioral states that structure spider capture sequences, achieving over 83% classification accuracy. We then developed a predictive framework combining a linear-filtered generalized linear model (GLM) with a hidden Markov model (HMM) that robustly forecasts behavioral transitions across diverse prey vibration contexts. Notably, spiders exhibit context-dependent motor transitions, such as crouching and shaking, following decreases in prey vibrational power, consistent with active sensing behaviors that enhance signal detection. Furthermore, spiders reliably turn toward the web radius exhibiting the highest vibration amplitude during prey localization, demonstrating that amplitude alone predicts turning direction. These findings reveal a structured, predictive sensorimotor transformation linking external vibration cues to internal behavioral states. Our results highlight general principles of active sensing and closed-loop control in non-visual invertebrate systems, with broader implications for sensorimotor integration across species.