Stabilization-Responsiveness Trade-offs in Continuous Shared-Control for Invasive Brain-Computer Interfaces
Stabilization-Responsiveness Trade-offs in Continuous Shared-Control for Invasive Brain-Computer Interfaces
Saussus, O.; Song, P.; De Schrijver, S.; Caprara, I.; Detry, R.; Janssen, P.
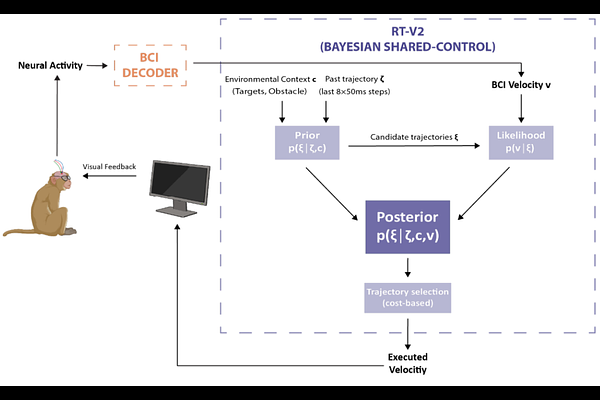
AbstractContinuous invasive brain-computer interfaces (BCIs) translate neural activity into continuous control signals. During ongoing control, fluctuations in these signals can reflect either transient execution noise or genuine changes in user intent, yet most BCI control systems do not explicitly distinguish between these possibilities. Assistive controllers must therefore determine whether variability should be stabilized as noise or expressed as intentional changes in movement. Here we evaluate a confidence-modulated shared-control framework that adaptively integrates decoded neural commands with a temporal prior to balance stabilization and responsiveness. Using macaque BCI navigation tasks that impose opposing control demands, we show that shared control nearly eliminates execution failures in obstacle-avoidance tasks while preserving the directional structure of commands. When goals change abruptly, however, the same temporal prior introduces transient inertia. Resetting the prior restores baseline performance, revealing a fundamental stabilization-responsiveness trade-off imposed by temporal priors during continuous arbitration.